![]()
is the most general form of an algebraic Riccati equation (all matrices are assumed to be of sizes n×n.
We define the matrix:

as the generalized Hamiltonian matrix associated with this Riccati equation.
Let:

be the right model matrix of H, such that:
is its spectral decomposition, i.e.:

Show that, if V1 is non-singular, then:
is a solution of the generalized matrix Riccati equation.
We start by plugging the proposed solution into the generalized matrix Riccati equation:

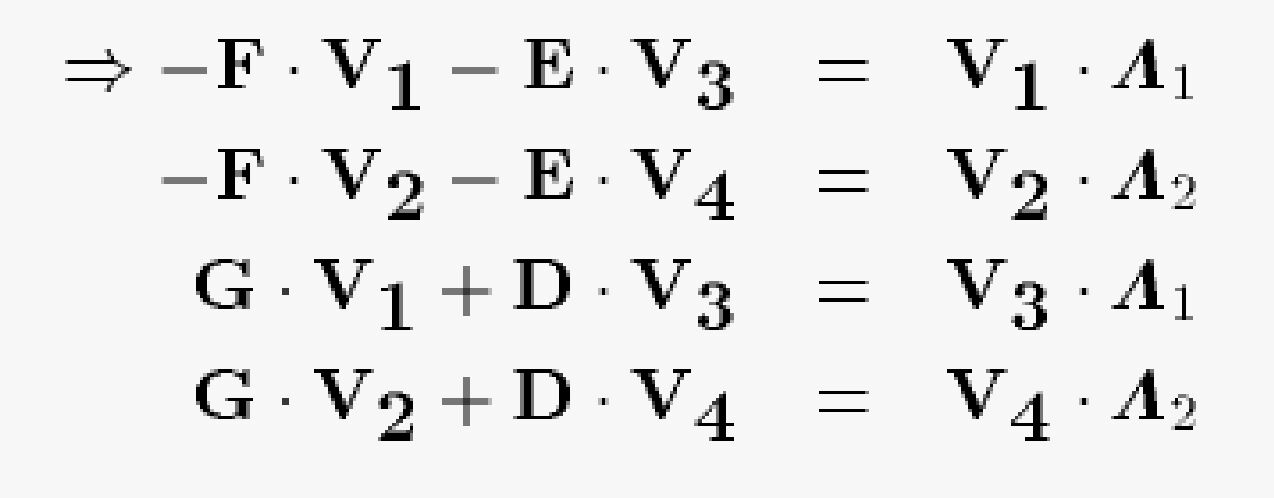
We decompose the eigenvector/eigenvalue matrix equation into its four component (still matrix) equations:
Let us solve the first of these equations for L1:
![]()
Plugging this into the third equation, we obtain:
![]()
Multiplying this equation from the right with V1-1, one gets:
![]()
which is the same as above except for the ordering of the terms.
We often like to have this system together with the state feedback:
behave like the model:
where:
One way to reformulate this problem is:
![]()
Thus:
![]()
or:

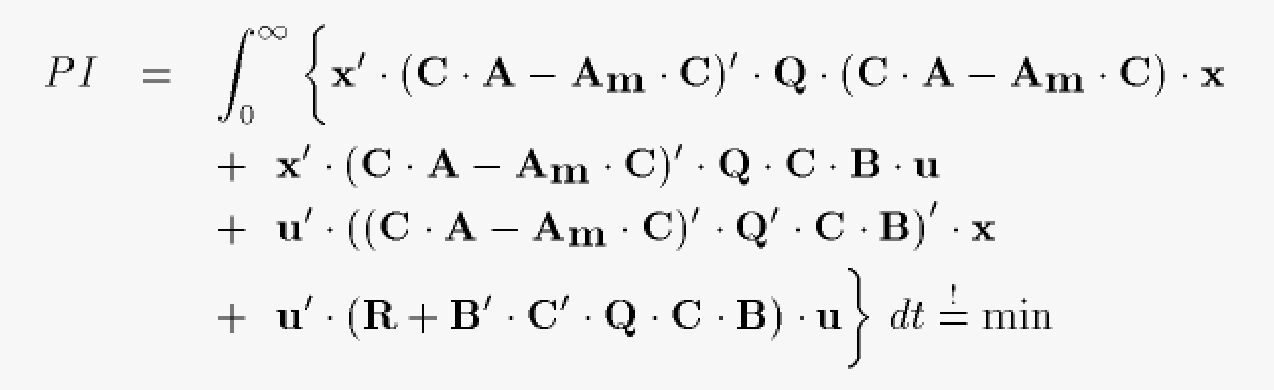
We want to reformulate this performance index in terms of a problem that we already know:

Find:
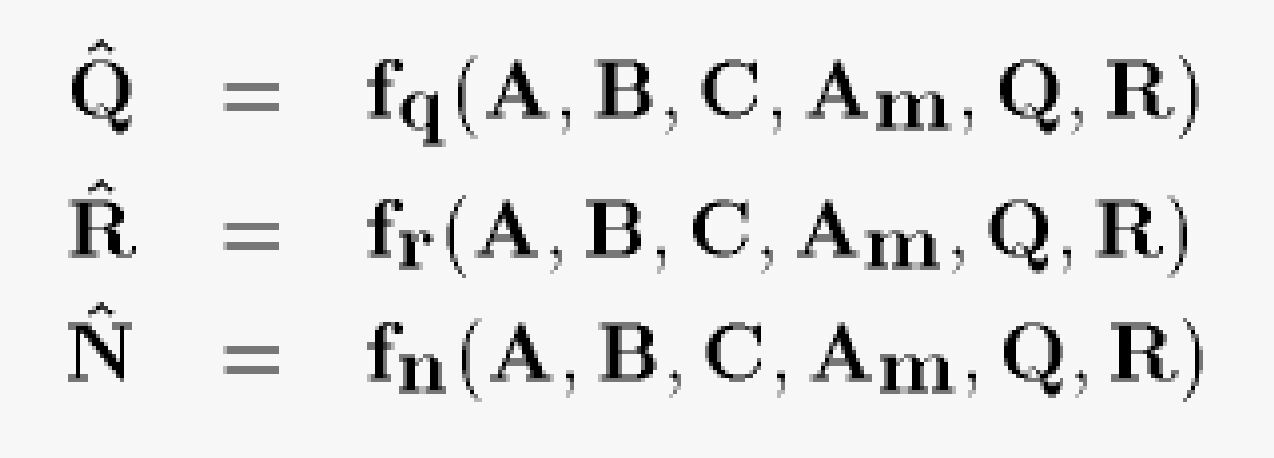
Then develop a Matlab code:

implementing the model follower optimal control problem.
By differentiating the output equation, we find:

and therefore:

Plugging this expression into the performance index, one obtains:

The terms can be rearranged as follows:
and assuming that:
one can find:
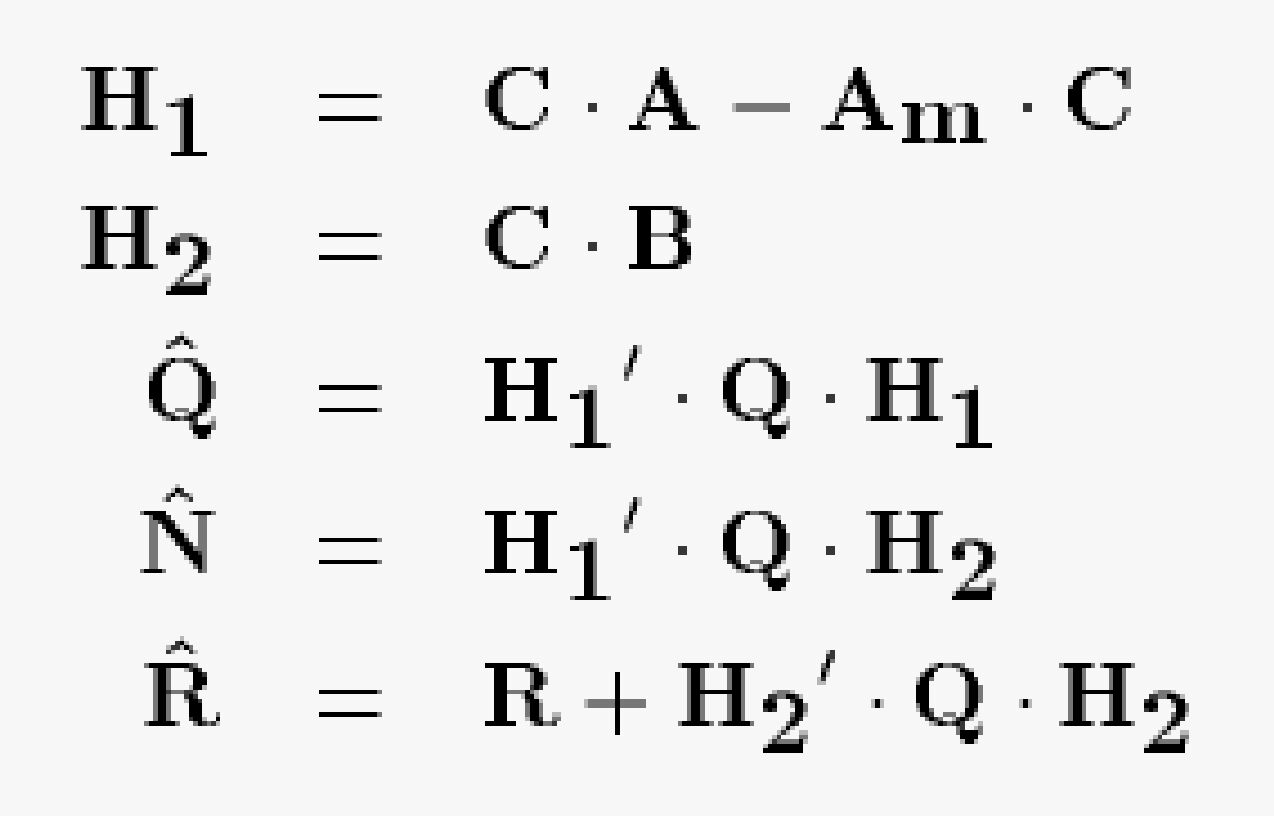
This can now easily be programmed into Matlab:
function [K,P] = modfol(A,B,C,Am,Q,R)
H1 = C*A - Am*C;
H2 = C*B;
Qh = H1'*Q*H1;
Nh = H1'*Q*H2;
Rh = R + H2'*Q*H2;
[K,P] = lqr(A,B,Qh,Rh,Nh);
return
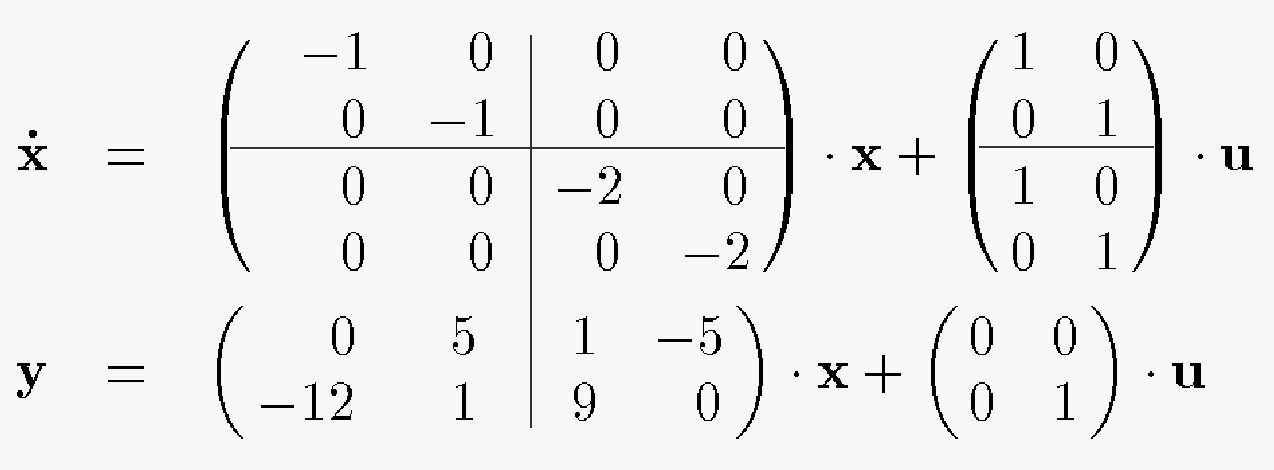
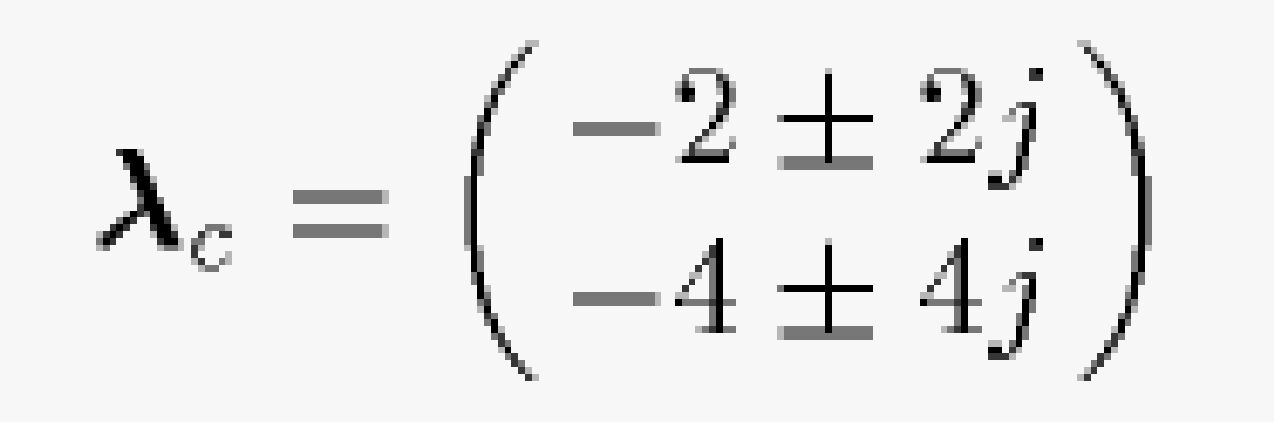
Design a functional observer for this system, such that the closed-loop poles are at the locations:
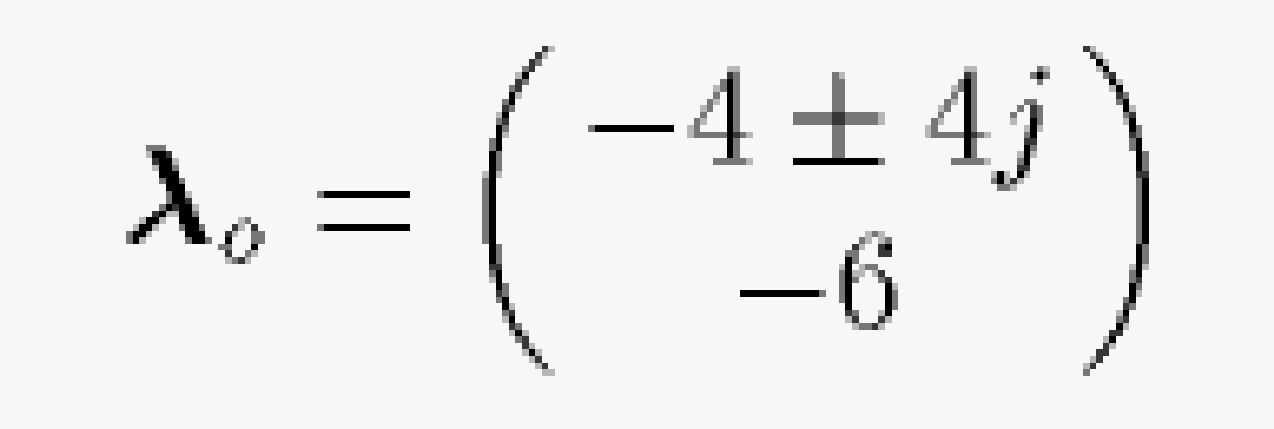
and the observer poles are at the locations:
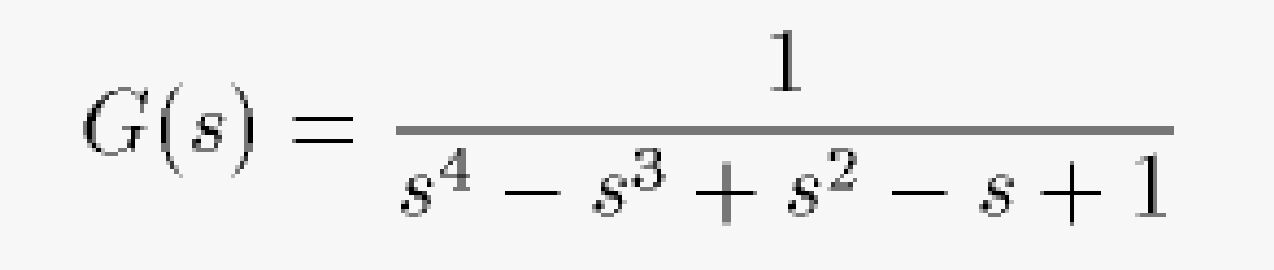
Find a 2-input / 1-output realization of this system:
where:

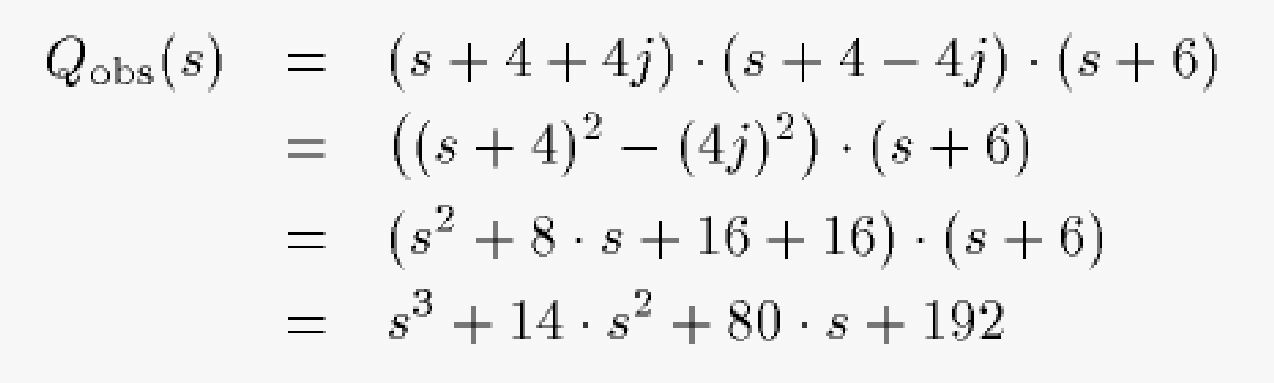
The open-loop denominator polynomial is:
![]()
The numerator polynomial (both open- and closed-loop) is:
The observer denominator polynomial is:
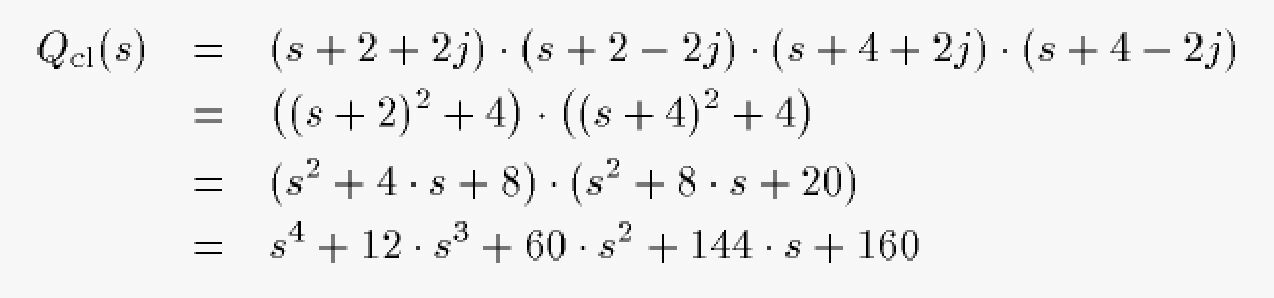
and the desired closed-loop denominator polynomial is:
Therefore:

Hence, the functional observer equations can be computed from the matrix equation:
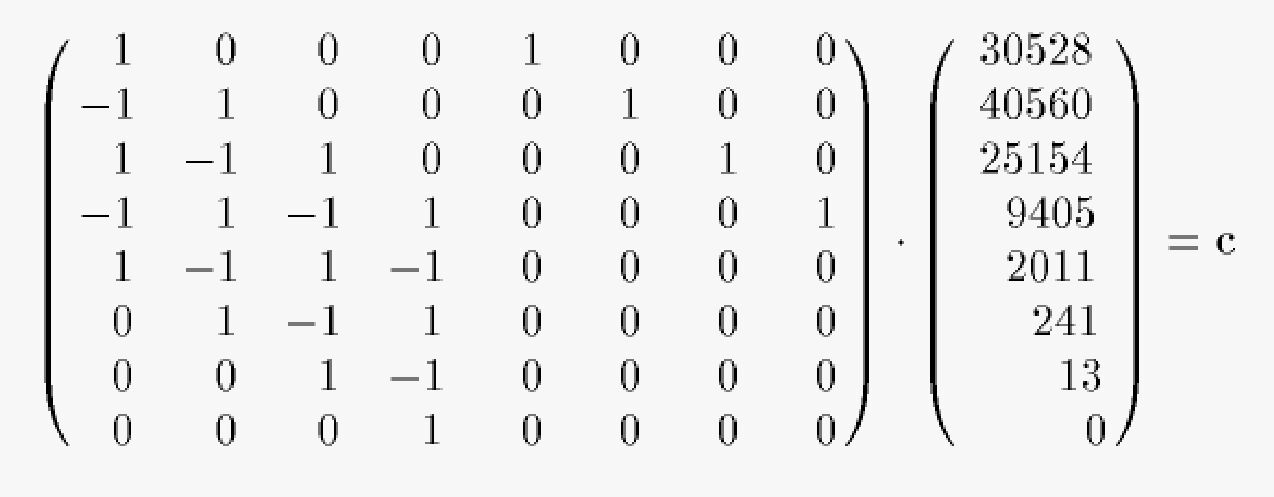
The resulting c-vector is:
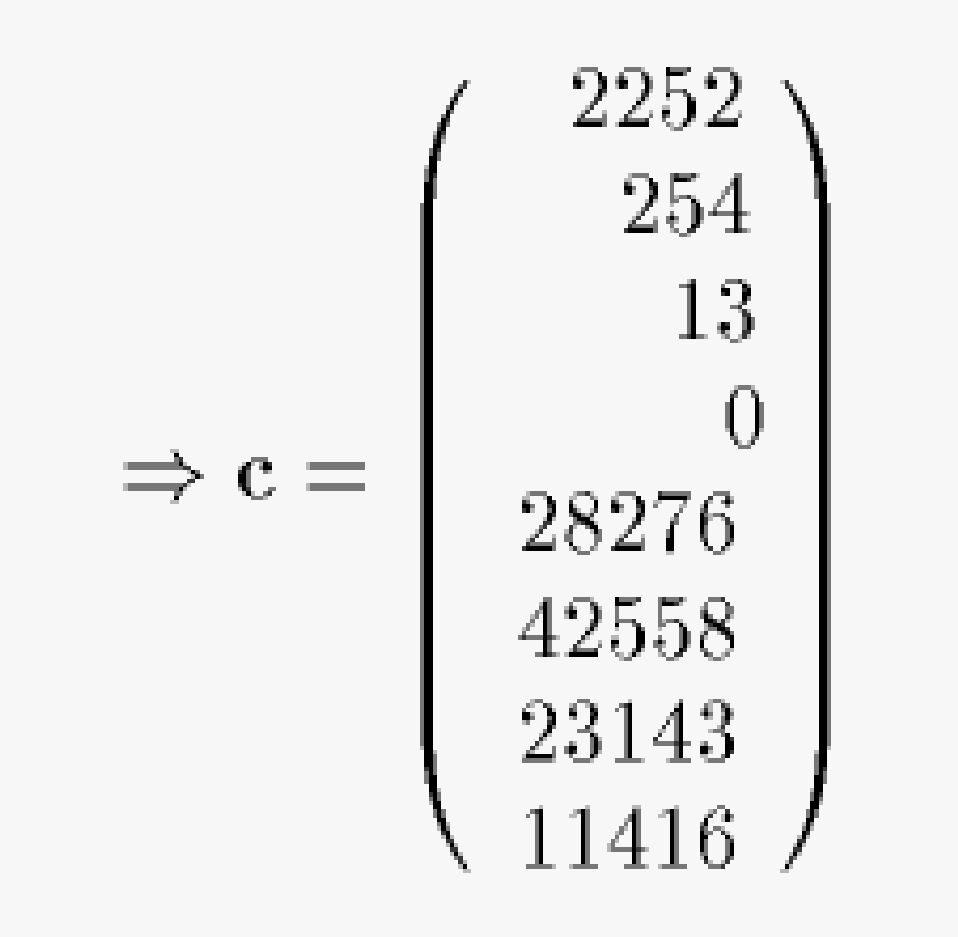
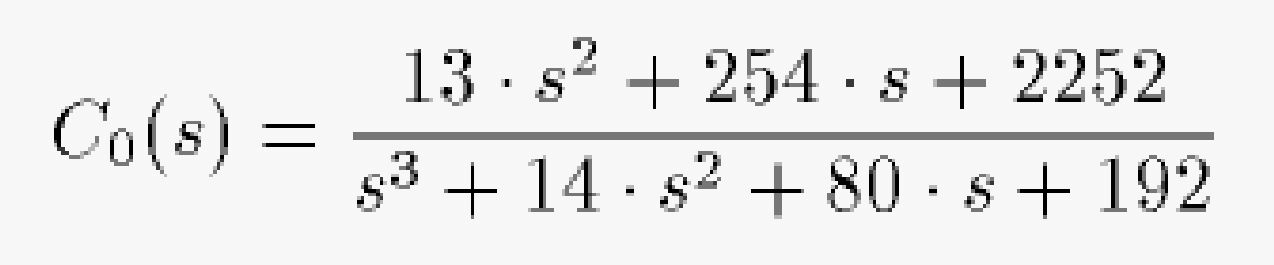
Thus, the two feedback filter polynomials are:
and:
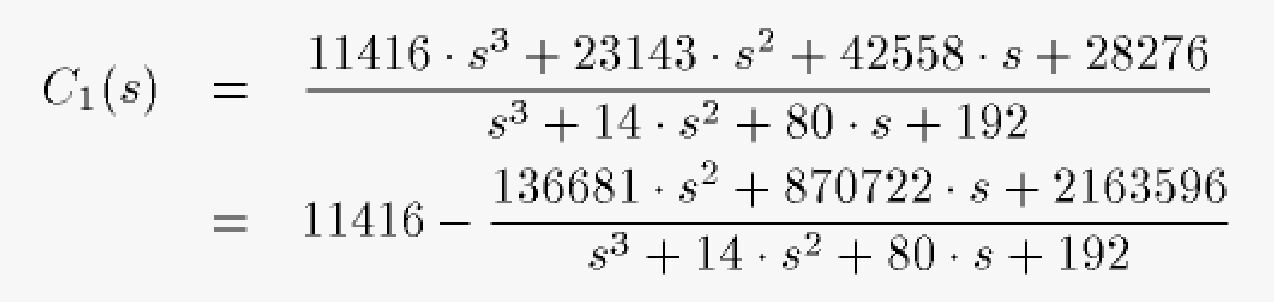
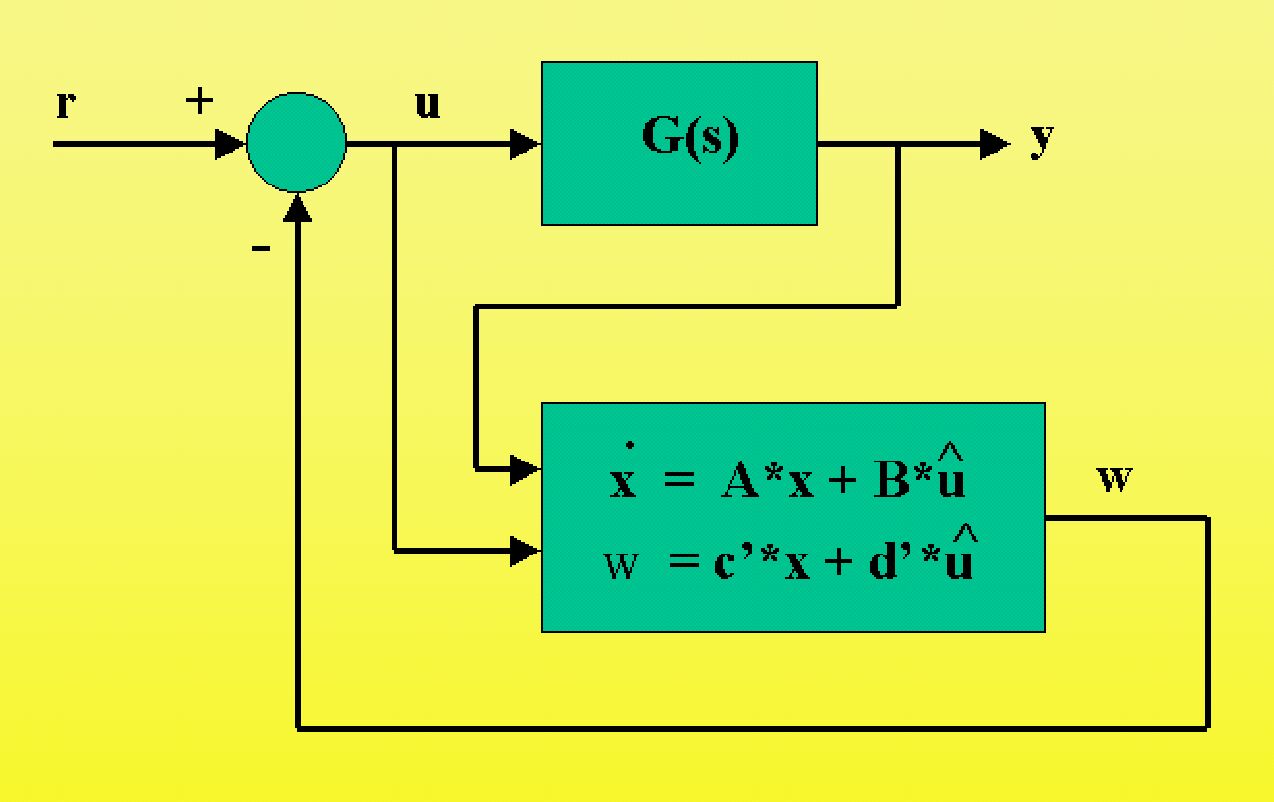
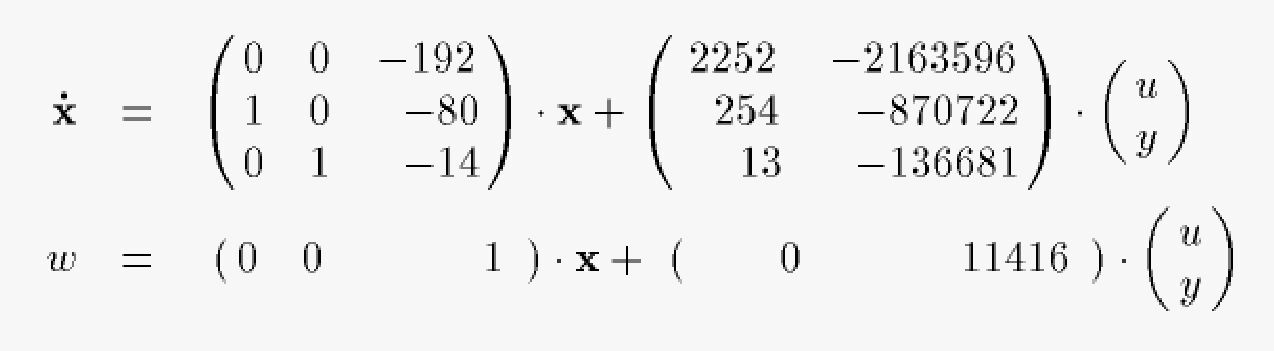
Thus, the feedback system can theoretically be realized as follows:
However, the gains are far too large for this system to be realizable in a meaningful fashion. The open-loop system has the poles so far away from the desired closed-loop poles, that the desired goals cannot be reached by realistic means.
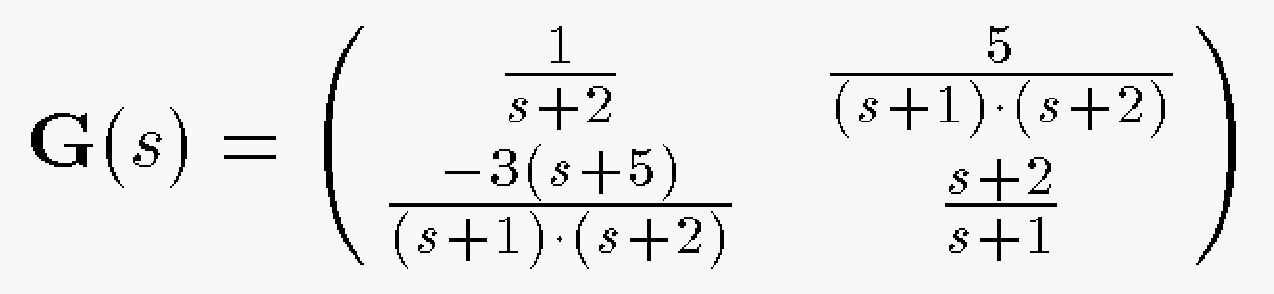
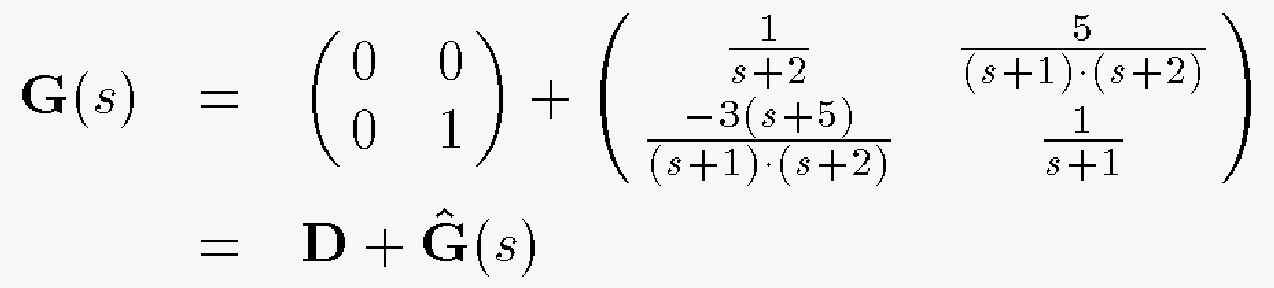
Find the Gilbert realization of this system.
First, we need to separate the strictly proper subsystem from the direct input output gain:
Now, we can perform a partial fraction expansion on the strictly proper subsystem:
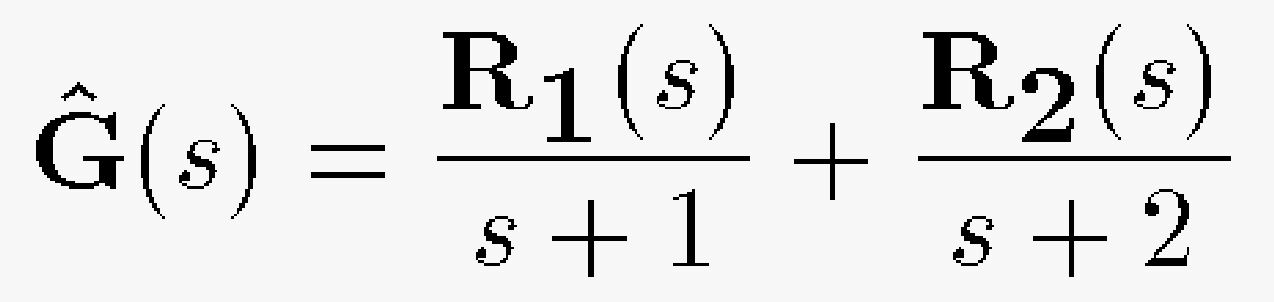
Thus, R1 is:
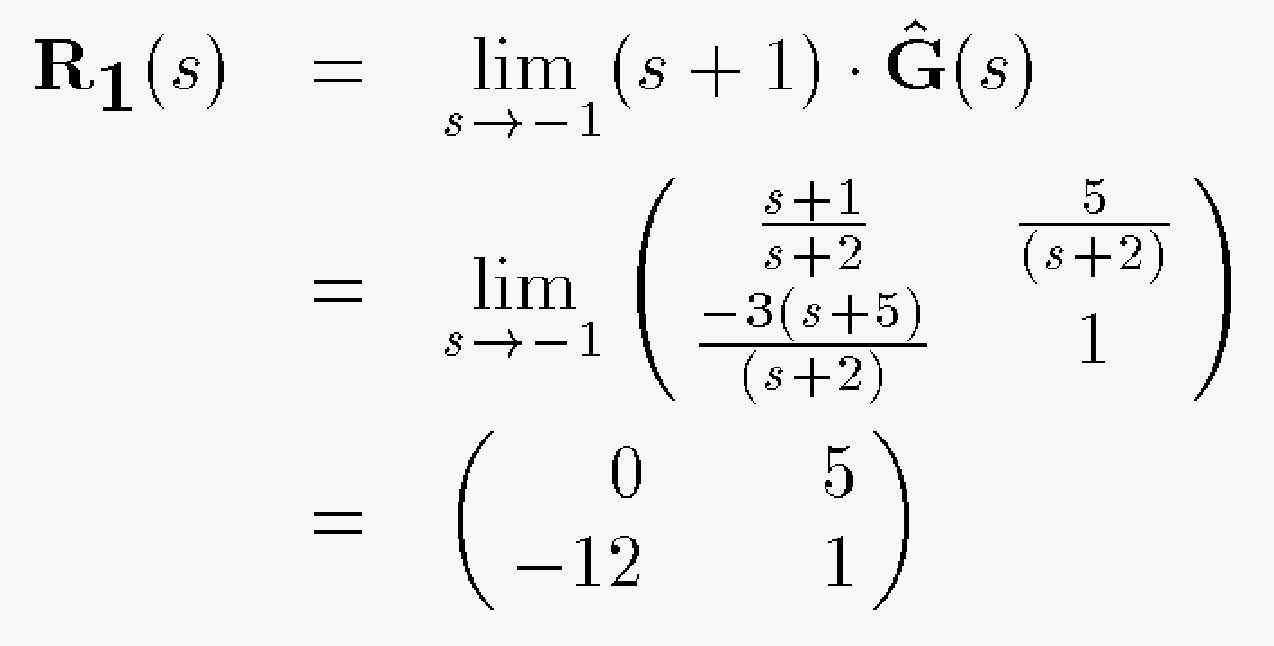
and R2 is:
This leads to the state-space description: